


(1)实验原理:
本虚拟仿真实验基于某款实际的验瓶机进行开发,内部所用器件、安放位置、工作原理等接近于实际检测线,主要包含传送带(平面式及竖向夹瓶式)、驱动电机、光电触发器、电源、控制器、处理器、相机及镜头、光源、工作箱、剔除器等部件。
来自洗瓶机的空瓶经传送带送往验瓶机,当瓶身工位1的光电触发器检测到有瓶子到达时,发出信号给控制器,控制器发出控制指令,控制此工位的灯光闪光照明和相机拍摄,图像送往处理器处理,并检测是否有缺陷。当瓶子正常时,将沿传送带继续前行,送到灌装机灌装;当检测到有缺陷时,发出信号给控制器,控制器将控制后面的剔除装置在恰当的时机将次瓶剔除。瓶身工位1之后是瓶口工位、瓶底工位,它们的工作过程与瓶身工位1的类似,只不过光源、相机等有所不同,再后面的瓶身工位2,与瓶身工位1相同。
整个虚仿实验分三大部分:理论学习、实验练习、实验考核。使用者首先在“理论学习”部分,学习和巩固光学成像知识、图像处理相关理论和算法、验瓶机系统构成机功能的学习等。在“实验练习”部分,可以基于于三维虚拟漫游详细了解学习系统构成和功能、单独练习对瓶口、瓶身、瓶底部分选择镜头、光源,拍摄图像,对图像进行一定的处理等,同时还可以练习设计和搭建验瓶机。在“实验考核”部分,使用者首先选择某种待检测型号的瓶子,根据瓶子尺寸,计算并选择相应的机身和镜头;从库中选择合适的硬件模型搭建验瓶机;模拟采集瓶身、瓶口、瓶底部位的图像,并采用一定的算法对图像进行处理、给出处理结果,对有缺陷的图像,要给出缺陷检测结果,如瓶口部分,缺陷主要包括外沿缺陷、口平面缺陷、内沿缺陷等;瓶底部分,主要有不透明或半透明污物、玻璃异物等;瓶身部分,主要有划伤、霉斑、污物等,此时也同时给出了处理的流程图;在完成了以上的工作后,要模拟验瓶机自动运行,通过大样本的检测,给出系统的正常检测率。
本虚仿项目的重点是图像获取、处理及缺陷检测。虚仿项目的使用者(学习者)扮演玻璃空瓶验瓶机的“设计者与制作者”,在学习掌握检测系统的结构、成像与图像采集的相关知识、以及数字图像处理的原理和主要算法的基础上,设计并制作一个验瓶机,使之能模拟运行,完成缺陷检测。
知识点:
共 20 个
- 1. 验瓶机的总体结构。从多个视角观察虚拟设备,熟悉各部分的功能,并进而确定此系统的设计和制作思路。
- 2. 传送带。用于传送玻璃瓶进入和离开验瓶机,这里主要用到平面式和竖式传送带。
- 3. 处理器。图像分析处理与运算的核心,主要功能是图像采集、图像处理、图像分析、缺陷检测等。
- 4. 控制器。主要是接收和发出控制指令,从而控制光源照明、相机拍摄、剔除次瓶等。
- 5. 工作箱、电源。内含辅助装置和设备、同时起到保护作用;给检测系统各部分供电。
- 6. 光源。根据所拍摄的部位不同,选用不同种类和功能的合适光源。
- 7. 剔除器。在控制器控制下的剔除次瓶的机电装置。
- 8. 相机。主要指机身,有时也指包含镜头,机身部分主要简化为选择合适尺寸的电荷耦合器件(CCD)或互补金属氧化物半导体(CMOS),图像传感器的重要参数之一是其成像尺寸,另一个重要参数是分辨率。
- 9. 镜头。主要参数有焦距、光圈、视野范围、景深、接口等。实验中重点考虑当选择某一CCD尺寸后,如何选择和计算焦距,以便用于不同图像的拍摄。
- 10. 薄凸透镜成像。薄凸透镜成像规律(亦称几何成像)是,即物距的倒数与像距的倒数之和等于焦距的倒数。
- 11. 实际物体尺寸换算为数字图像中的像素。用于实际物体尺寸与数字图像中像素的换算,主要目的是确定缺陷的实际尺寸。
- 12. “玻璃空瓶验瓶机”国家标准,要掌握玻璃瓶缺陷、检出率、误检率等概念和内容。
- 13. 灰度变换。直方图均衡化:灰度直方图的概念、用于图像增强的原理、计算等。伽马校正:是图像灰度变换增强的一种,包括概念、原理和计算。分段线性变换:是图像灰度变换增强的一种,包括概念、原理和计算。
- 14. 噪声去除。常见的噪声有白噪声、高斯噪声、椒盐噪声、周期干扰噪声等。用图像平滑的方法抑制高斯噪声。用中值滤波去除椒盐噪声的方法和实现。用频域陷波滤波器去除周期性干扰噪声的方法和实现等。
- 15. 阈值分割。通过阈值化实现图像分割,关键是阈值的计算和选取,包括最优阈值和最大类间方差阈值的概念、原理和算法。
- 16. 边缘提取。边缘提取(检测)是基于边界的一大类图像分割方法,通过寻找图像中不同区域的边界,达到图像分割的目的。一阶微分算子:一阶微分算子有Roberts算子、Prewitt算子、Sobel算子、Canny算子等。二阶微分算子:主要是拉普拉斯算子和LOG算子。
- 17. Hough变换。Hough变换是一种检测、定位直线和解析曲线(如圆、椭圆等)的有效方法,包括对偶空间的概念、变换原理等。
- 18. 重心法提取区域和区域中心理论和算法。
- 19. 区域标记理论和算法。
- 20. 图像描述理论和算法。主要是计算连通区域的面积、周长等。
(2)核心要素仿真设计:
1)本虚仿实验中所用的验瓶机外观结构、系统构成和布局、功能、工艺流程等,来源于市场上某品牌的验瓶机,以及依据相关国家标准(GB_T 38459-2020 玻璃空瓶验瓶机、GBT34268-2017 啤酒玻璃瓶灌装生产线通用技术要求),仿真度高; 2)所仿真的啤酒瓶,是依据国家标准(GB4544-1996 啤酒瓶)和市场上使用的瓶子,仿真度高; 3)所仿真啤酒瓶上的缺陷,是根据国家标准(GB_T 38459-2020 玻璃空瓶验瓶机)中的类型和尺寸,经过合理简化而来,仿真度较高; 4)所仿真的CCD规格尺寸,是工业上所使用的的标准尺寸,仿真度高; 5)依据光学成像计算公式,根据相关参数计算镜头焦距,仿真度较高; 6)所仿真的成像环节,经过合理的简化,是拍摄的图像质量更好,仿真度较高; 7)所使用的图像处理理论和算法,是教科书中的内容,采用C#语言编程实现,仿真度高; 8)所仿真的缺陷检测,是依据所拍摄图像、缺陷类型和尺寸、图像处理结果加以判断,仿真度较高; 9)所仿真的验瓶机自动运行及检测,是建立在前面工作的基础上,模拟大样本测试,给出检测结果,仿真度较高。
|
2-1 团队主要成员 |
||||||||||||
|
序号 |
姓名 |
出生年月 |
单位 |
职务 |
职称 |
手机号码 |
电子邮箱 |
承担任务 |
||||
|
1 |
孙农亮 |
1962-02-10 |
山东科技大学 |
无 |
教授 |
13869861730 |
nl-jackson@vip.163.com |
负责人,项目总体设计与管理、授课、指导实验、在线教学服务 |
||||
|
2 |
滕升华 |
1977-07-10 |
山东科技大学 |
系主任 |
副教授 |
15953387721 |
tengshenghua@163.com |
授课、算法编程、指导实验、在线教学服务 |
||||
|
3 |
王雪琴 |
1979-11-06 |
山东科技大学 |
无 |
讲师 |
13854225926 |
jiaxue1@sina.com |
授课。指导实验。在线教学服务 |
||||
|
4 |
李晶 |
1978-10-27 |
山东科技大学 |
无 |
讲师 |
13780661971 |
peilianglj@163.com |
授课、算法、指导实验、在线教学服务 |
||||
|
5 |
刘向群 |
1979-11-14 |
福建犀牛智慧科技有限公司 |
技术总监 |
工程师 |
18101039058 |
25122@qq.com |
在线资源管理、技术支持 |
||||
|
2-2 团队其他成员 |
||||||||||||
|
序号 |
姓名 |
出生年月 |
单位 |
职务 |
职称 |
承担任务 |
||||||
|
1 |
赵猛 |
1978-09-14 |
山东科技大学 |
系副主任 |
副教授 |
授课、算法、指导实验、在线教学服务 |
||||||
|
2 |
安效伟 |
1985-09-06 |
山东科技大学 |
无 |
博士研究生 |
开发、维护、在线教学服务 |
||||||
|
3 |
钟威 |
1992-07-13 |
福建犀牛智慧科技有限公司 |
无 |
工程师 |
程序开发、技术支持 |
||||||
|
4 |
陈浩 |
1995-09-15 |
福建犀牛智慧科技有限公司 |
无 |
工程师 |
后台管理、技术支持 |
||||||
|
5 |
陈晓辉 |
1994-02-24 |
福建犀牛智慧科技有限公司 |
无 |
工程师 |
UI界面设计、技术支持 |
||||||
|
6 |
叶晓香 |
1998-10-25 |
福建犀牛智慧科技有限公司 |
无 |
助理工程师 |
3D模型设计、技术支持 |
||||||
(1)必要性
工业啤酒灌装生产线主要包含洗瓶、空瓶检测、灌装、杀菌、贴标、装箱等环节。其中,玻璃空瓶验瓶机(以下简称验瓶机)用来检测啤酒空瓶是否存在缺陷,是保障啤酒成品质量的重要设备。
验瓶机是一个集光、电、机、信息等一体化的检测系统,采用高速CCD摄像机及图像处理器,准确地对瓶口、瓶底、瓶身缺陷进行检测处理,并剔除带缺陷的瓶子。这里的核心技术包含了成像原理、图像处理、检测技术、模式识别、控制技术等,涉及到图像处理课程中多处知识、算法、以及知识的运用;若这样的系统能用于实验教学,这会对学生掌握知识、运用知识、解决复杂工程问题能力的锻炼起到很大的作用。但该系统复杂而昂贵,在实际生产线中封闭式、全自动运行,其内部工作过程及原理对旁观者而言是“看不见、摸不着”的。若将该系统直接用于实验教学,则因其成本、技术、危险性等因素而变得异常困难。
山东科技大学数字图像处理课程国家级教学团队是一个集教学与科研于一体的团队,对“啤酒瓶缺陷检测系统”(玻璃空瓶验瓶机)有深入的研究,将此成果作为图像处理典型案例写在团队成员撰写的“数字图像处理(2007.9版)”教材中和十二五国家级规划教材“数字图像处理(2016.8版)”教材中,且参与最新国家标准“玻璃空瓶验瓶机(GB/T 38459-2020)”的制定。
在以往的教学中,主要通过上课讲解、工厂参观的方式进行,正如前述的种种因素,这种教学效果并不理想。因此借助现代信息技术,开发能用于实际教学的实验系统是非常有必要的和有意义的。
(2)实用性
本虚仿实验项目基于虚拟现实(Virtual reality,VR)技术,搭建了一个验瓶机的设计与生产运行环境,在“理论学习”模块,学习和巩固光学成像知识、图像处理相关理论和算法、验瓶机系统构成机功能的学习等;在“实验练习”模块,可以基于于三维虚拟漫游详细了解学习系统构成和功能,可以反复练习设计和搭建验瓶机,单独练习对瓶口、瓶身、瓶底部分选择镜头、光源,拍摄图像,对图像进行一定的处理等;在“实验考核”模块,使用者首先选择某种待检测型号的瓶子,从库中选择合适的硬件模型搭建验瓶机,计算镜头焦距,采集瓶身、瓶口、瓶底部位的图像,并采用一定的算法对图像进行处理、检测出缺陷等等,最后还可模拟验瓶机自动运行,通过大样本的检测,给出系统的正常检测率。在这里学生不用考虑高成本、高危险性等因素,可以反复全面地学习和锻炼能力,因此本虚仿项目是非常实用的。
(3)合理性
验瓶机是一个集光、电、机、信息等一体化的检测系统,涵盖的知识或课程包括传感器原理、检测技术、成像原理、图像处理、模式识别、机器视觉、自动控制、PLC、机械设计、等等,但要把这些涉及到的课程内容不加选择、不分轻重地都融入本虚仿实验,将使其变得庞大、繁杂而很难开发和使用。
传感器原理及检测技术、数字图像处理是我校电子信息工程专业的核心课程,成像原理、模式识别、PLC是专业课程;而验瓶机中涉及图像处理多个知识、算法及应用,主要包括噪声去除、灰度变换增强(伽马校正、对比度增强、直方图均衡化等)、边缘提取(一阶微分算子、二阶微分算子等)、阈值分割(Otsu算法、手动阈值)、Hough变换、重心法、区域标记、图像描述、等等,这也是我们最要体现的和培养学生的地方,所以本虚仿项目首先隶属于数字图像处理课程;但只有图像处理相关内容,并不能使验瓶机工作起来,因此其他一些较重要的知识和内容也作为必要部分出现了。这样重点突出、详略得当、粒度合适,因此教学设计是合理的。
(4)先进性
本虚仿实验项目不是一个简单验证性实验,不是简单地“验瓶机”工作原理的再现,若那样学生可操作和锻炼的机会就非常有限,起不到应有的作用。
在这里,让学生扮演一个“设计者与制作者”,因此学生需要较系统地学习掌握相关的理论、算法,验瓶机的工作原理、结构组成等,在其中又有重点地强化图像处理相关的知识和能力;在以上基础上,设计、搭建自己的验瓶机,并最后使验瓶机模拟运行,给出检测结果。
这可看成是首先抛出了一个复杂的工程问题(玻璃瓶缺陷检测),而在问题驱动(或任务驱动)下,学生需要从学习、练习入手,最后完成设计和制作验瓶机的任务,得到全面而有挑战性的能力锻炼。因此,本实验系统具有先进性。
客户端到服务器的带宽要求:
基于公有云部署的系统,客户端不少于5-10M带宽;基于局域网部署的系统,客户端不少与10-50M带宽
能够支持的同时在线人数:
100
非操作系统软件配置要求:
谷歌浏览器、火狐浏览器
需要特定插件:
否
其他计算终端非操作系统软件配置要求:
无
“玻璃空瓶验瓶机设计与制作虚拟仿真教学实验”是基于VR技术,搭建了一个虚拟的设计和生产环境,使学生扮演一个“设计者与制作者”的仿真模拟实验,以计算机仿真技术、多媒体技术和互联网技术为依托,采用面向服务的软件架构开发具有自主产权,集实物仿真、创新设计、智能指导、实验结果自动上传和教学管理与一体,具有良好的自主性、交互性和可扩展性的虚拟实验教学平台,同时为其他学科的相关实验提供标准化的调用接口,为用户提供统一的访问接入服务和通用的用户服务工具包。
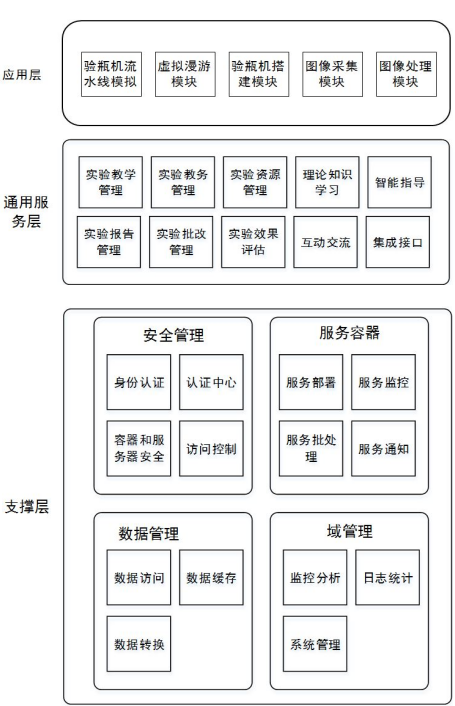

如图所示,本项目将玻璃空瓶验瓶机设计与制作虚拟仿真教学实验平台及资源分为三层,每一层都为其上层提供服务,直到完成虚拟实验环境的构建。下面将按照从下至上的顺序分别阐述各层的具体研发任务与主要的研究内容。
(1)数据层
虚拟仿真实验教学资源涉及到多种类型虚拟实验组件、实验实例、实验课程、软件及用户数据等,这里分别设置实验课程库、标准答案库、实验数据库、用户信息库等来存放和管理
(2)支撑层
支撑层是本项目的核心框架,负责整个基础系统的运行、维护和管理。服务基础支撑平台包括以下几个子功能:服务容器、安全管理、数据管理、域管理等。
(3)通用服务层
通用服务层提供虚拟实验环境的一些通用支持组建,以便用户能够快速地搭建自己的虚拟实验环境。这些通用服务包括:实验教学管理、实验教务管理、理论知识学习、智能指导、实验批改管理、实验报告管理、实验效果评价、互动交流、集成接口。
-
 湄职院公众号
湄职院公众号 -
 关注招生动态
关注招生动态
联系地址:莆田市涵江区梧塘镇荔涵东大道1001号 联系电话:0594-7692626 招生咨询热线:0594-8166999